Time for some more radar detector testing! This time let’s test out all the best custom installed radar detectors. Which ones offer the best performance? Let’s find out!
To test this out, we headed back to the red barn course to run the gauntlet with 7 different radar detectors against 33.8, 34.7, 35.5, & K Band.
We tested both easy and hard scenarios for the radar detectors. We tested different frequencies and saw a variety of results between upper tier and lower tier detectors. Of course no one test can tell us everything, but we learned a ton by trying lots of different things with so many detectors. 🙂
Custom Installed Radar Detectors
Here’s the lineup of radar detectors in this test:
- Escort Max Ci 360 ($2000 front, $2400 front + rear), fw 1.10 (provided by Escort)
- Radenso RC M ($1600 front, $1850 front + rear), fw US12 (provided by Radenso)
- Net Radar DSP ($650 front, $1150 front + rear), fw 5.5.3 / 110.207 (provided by Net Radar)
- Stinger VIP ($2550 front, $3940 front + rear), fw 4.6.00UK (provided by Stinger)
- K40 RL360di ($1300 front, $2000 front + rear) (retail unit)
- Whistler Pro-3700 ($350 front, $450 front + rear) (retail unit)
- Adaptiv TPX Pro ($400) (prototype, provided by Adaptiv)
- Bonus: Uniden R7 ($600) 1.22 (provided by Uniden)
Video of the Radar Detector Testing
If you’d like to watch my video of the testing and see the detectors in action, here ya go.
Otherwise, keep going and you can read over everything and see how they all performed. 🙂
Mounting the Radar Detectors
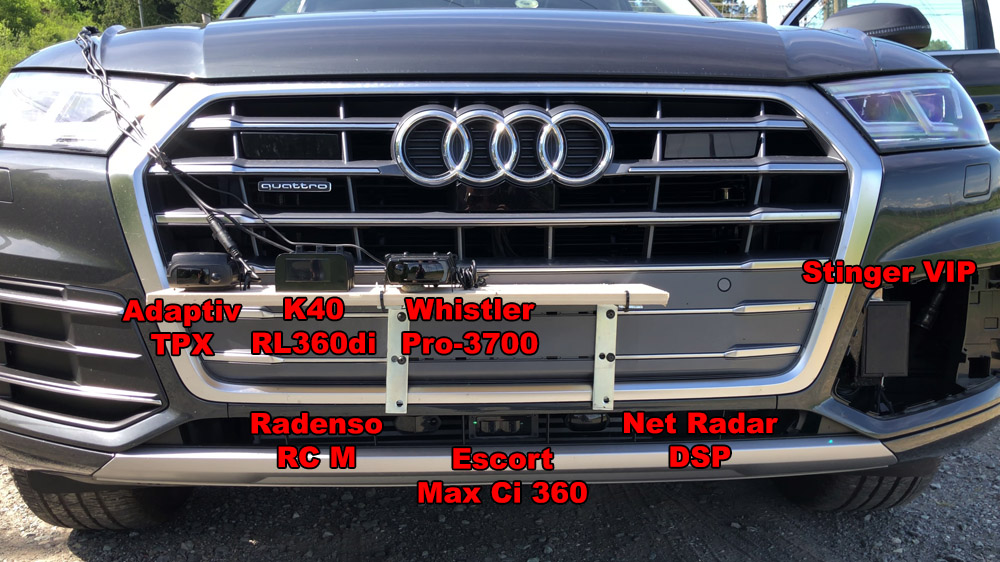
The Max Ci 360, RC M, NR DSP, and Stinger VIP have been professionally and permanently installed in my vehicle for testing. The first three are down in my lower air intake and the Stinger is back behind a removable foglight panel. (You can see them in the photo above.)
The other detectors I was hoping to temporarily stuff into my grill, but they didn’t fit, especially the K40 which is tall and bulky. To mount the detectors, @meismyname built a mount to attach the three new radar detectors to my grill.

Adaptiv TPX Pro, K40 RL360di, and Whistler Pro-3700 mounted to my grill
To log all the runs on camera to review afterwards and for the YouTube video, I mounted the alert LED’s onto my dash in front of a GoPro.
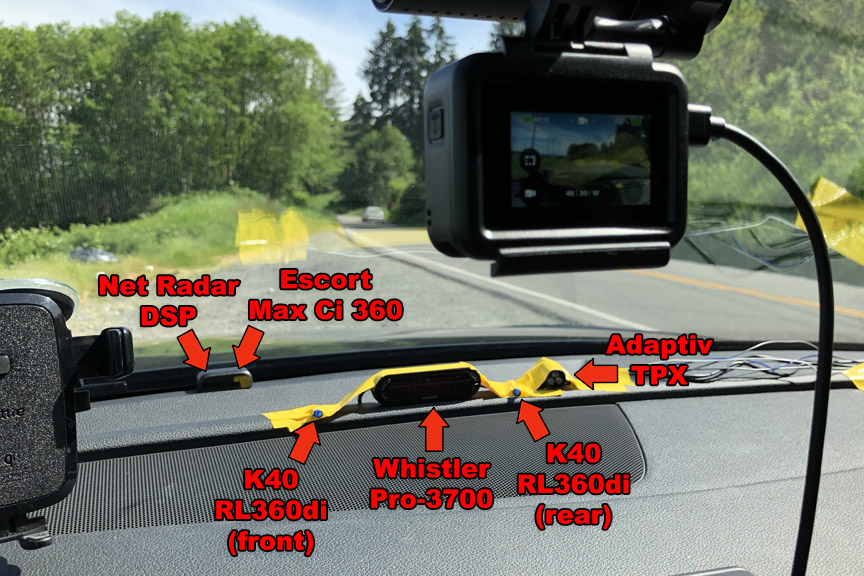
Alert LED’s on the dash
Regarding the Adaptiv TPX…
 A quick word about the Adaptiv TPX. It is a motorcycle specific radar detector, not one designed for automotive usage. It’s for this reason that it’s not one that I’m able to properly test and review. However, you guys have asked me to test one for ages so I got one before testing and ran it alongside all the other detectors to see how it compares in terms of range.
A quick word about the Adaptiv TPX. It is a motorcycle specific radar detector, not one designed for automotive usage. It’s for this reason that it’s not one that I’m able to properly test and review. However, you guys have asked me to test one for ages so I got one before testing and ran it alongside all the other detectors to see how it compares in terms of range.
Unfortunately, however, I’m not going to be able to use any of the test results from the Adaptiv TPX. 🙁
They originally sent me a prototype unit that has new beta hardware and software for improved BSM filtering. Once I heard that, I asked for a retail unit because I like testing with production grade hardware that represents what we will all experience in terms of features, performance, and reliability. Unfortunately on test day I ran the prototype unit and didn’t realize that until I got home.
It turns out that the prototype isn’t tuned for proper radar detection and all the radar bands detect at 10 dB (or more) less than spec. That’s a substantial difference which means that retail detectors should perform significantly better than the prototype I tested. (From other testing I’ve seen, however, even retail units aren’t very strong performers.) Additionally I saw some malfunctions with the alert LED since the cabling was changed too which led to the detector sometimes not visually alerting at all. Because of this, my results with the TPX are effectively useless and I have to throw away all the results. That sucks…
I’m pretty disappointed about this because it takes a ton of time and coordination to do tests like this and I was looking forward to seeing how it fared and sharing the results with you. Because I’ve got a baby about to be born in a matter of weeks (yay!), I don’t have time to go out and retest everything.
So for those of you really interested in the detector, I’m going to leave the TPX testing up to you guys who ride motorcycles. At the end of the day, since this a radar detector with unique features specifically designed for motorcycle riders, you guys would be the best people to run this detector and share your experience anyways.
If you’d like to test the TPX, you can pick one up online and try it out. Please share your videos on YouTube and experiences on the radar detector forum. If you like it, keep it and enjoy it. If not, you can return it within 30 days. Either way, I look forward to hearing your take on the TPX!
Radar Guns
Coming back to the test, let’s look at the radar guns next. The radar guns were sitting on the dash of the radar car parked on one end of the course as the radar detector vehicle would repeatedly drive towards it. The longest detections win.

Radar Guns used for testing:
- 33.8: MPH Bee III
- 34.7: Stalker II
- 35.5: Decatur Genesis II
- K Band: Decatur Genesis II
Radar Detector Test Course
The test course is about half a mile long from the red barn to the radar car. Along the way there’s a few curves and some vegetation and trees periodically blocking the radar gun’s signal.

Without further ado, let’s start diving into the test results.
33.8 (Easy) Test Results
Starting off with 33.8, we set the car up in the standard gravel pullout and started doing some passes with different radar detectors to see how things fared.

Before committing to a full test with all the detectors, I like to run a few initial passes with different tiers of detectors to see how things look. What we started finding was that most all of the detectors did quite well.

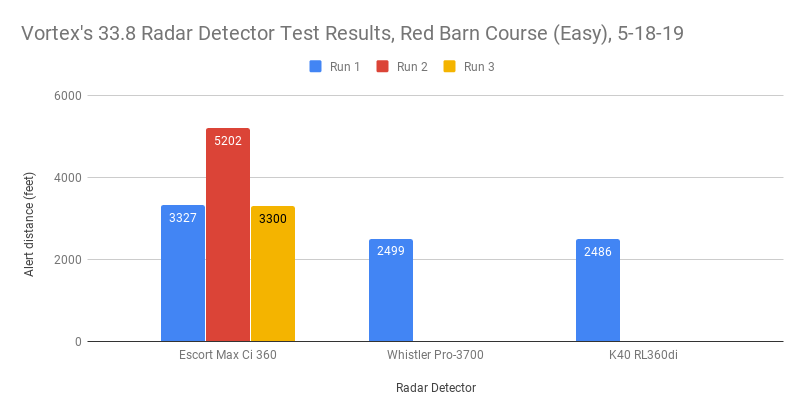
The Max Ci 360, which I ran as a benchmark, was alerting well before the red barn. Like in previous testing, it also managed one monster detection about a mile away before losing the signal and resuming alerting before the barn like the other two runs.
The less sensitive detectors (including the TPX, not shown) all managed to get an alert shortly after the red barn, just under half a mile away. That’s plenty of range in practice too.
Seeing results like this is good to know because it means that in easier situations, even less sensitive detectors can still provide adequate range.
To get more separation between detectors though and make things a little tougher for the radar detectors, I decided to adjust the position of the radar car.
33.8 (Difficult) Test Results
Earlier the radar gun’s antenna was blasting not only into the kill zone directly in front of it, but also way down the test course just off to the right. To make things more challenging, I drove forward a little bit so that some foliage and power line poles were blocking a lot of the signal from traveling down range.

The goal here was to reduce the amount of signal available farther down the test course, making it a little more challenging for the radar detectors.
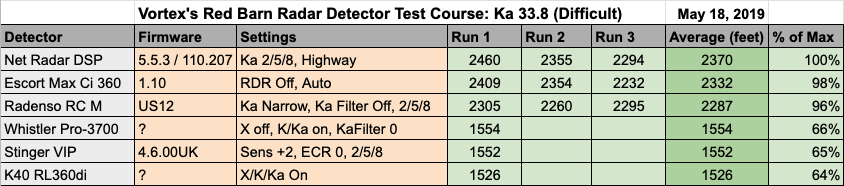
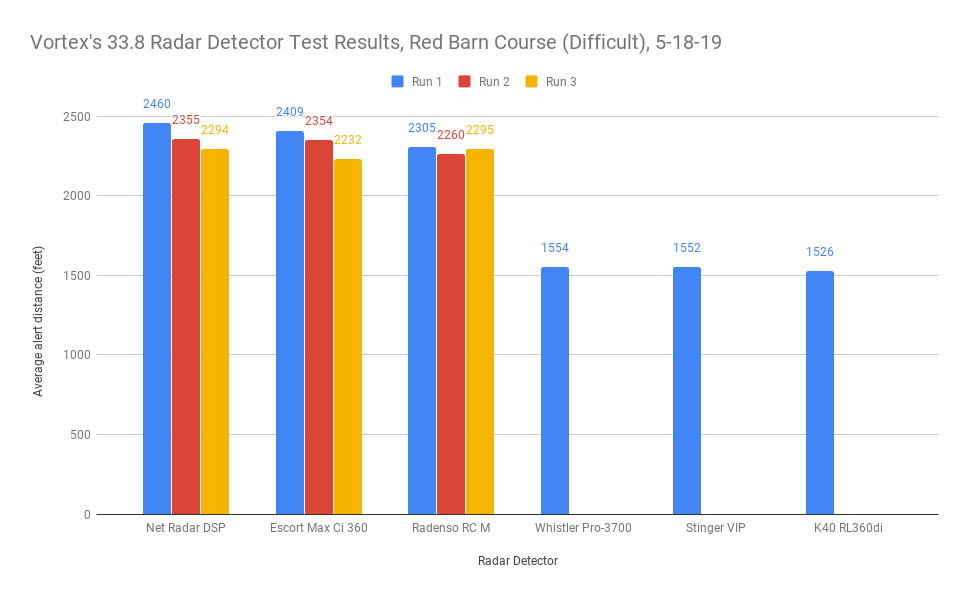
Unfortunately the battery powering the radar gun died during testing and so I wasn’t able to complete 3 runs per detector.
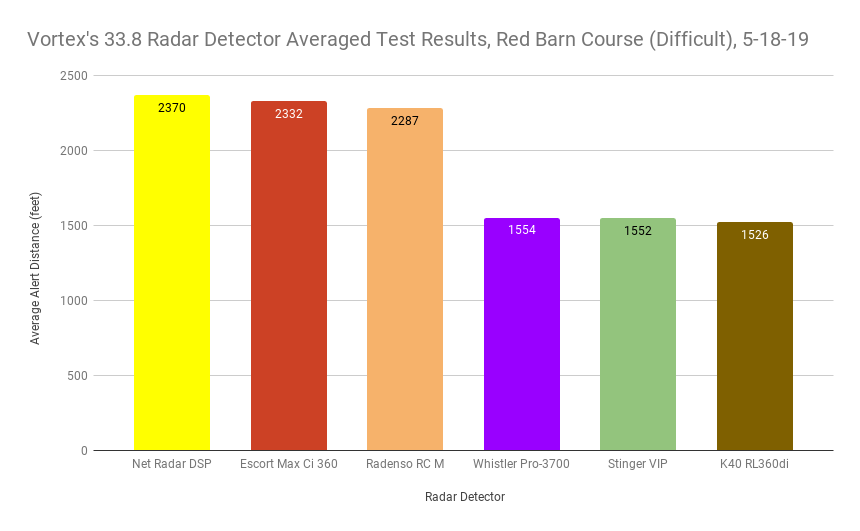
Here’s a quick look at the average of every detector’s test runs, color coded to make it easier to quickly find detectors as you scroll through. 🙂
 This new setup worked well and you can see how the different detectors start to separate. Most of the higher end detectors were all able to alert after the red barn, just under half a mile away. The other detectors alerted farther down the course, around the area where I’d have visual line of sight to the radar vehicle behind the bushes. Note: The actual kill zone where the radar gun could acquire my vehicle’s speed was at around 400 feet.
This new setup worked well and you can see how the different detectors start to separate. Most of the higher end detectors were all able to alert after the red barn, just under half a mile away. The other detectors alerted farther down the course, around the area where I’d have visual line of sight to the radar vehicle behind the bushes. Note: The actual kill zone where the radar gun could acquire my vehicle’s speed was at around 400 feet.
The Stinger gave a shorter range detection for its one pass. I’d expect it would do better given the chance to have several more runs, but that’s just a guess.
Looking at these initial results though, it looks like I’m seeing similar terrain-limited results where there’s spots in the course where the signal suddenly gets stronger and so multiple detectors alert in the same area. Only the most sensitive detectors can pick the signal up in the weaker zones.
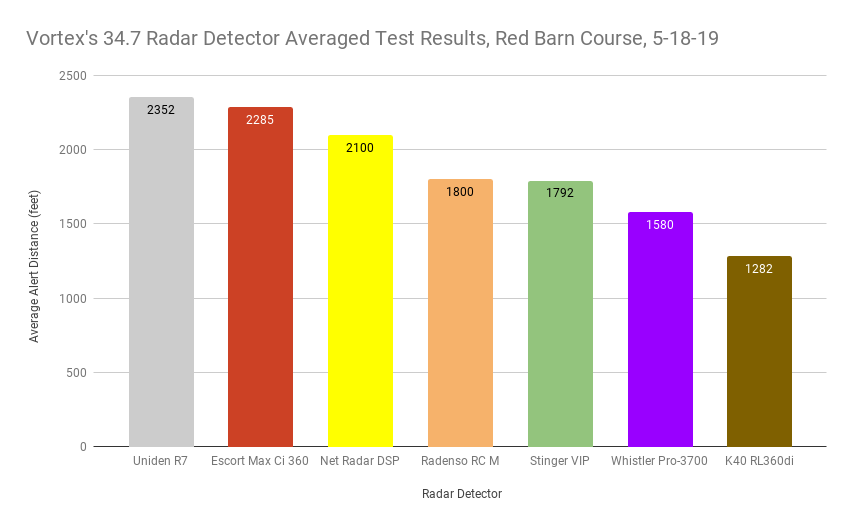
34.7 Test Results
After the 33.8 testing ended early, I swapped batteries and fired up the Stalker II (which has its own battery). I was still parked in the same difficult location and ran a full set of test runs.

First things first, here’s all the test runs.
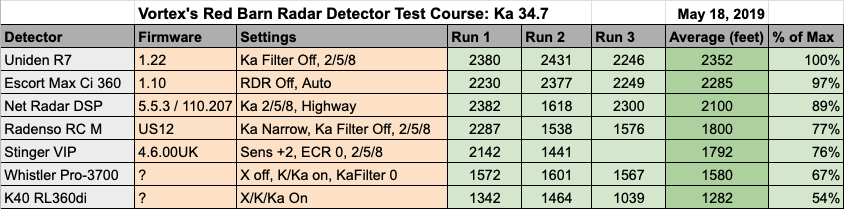
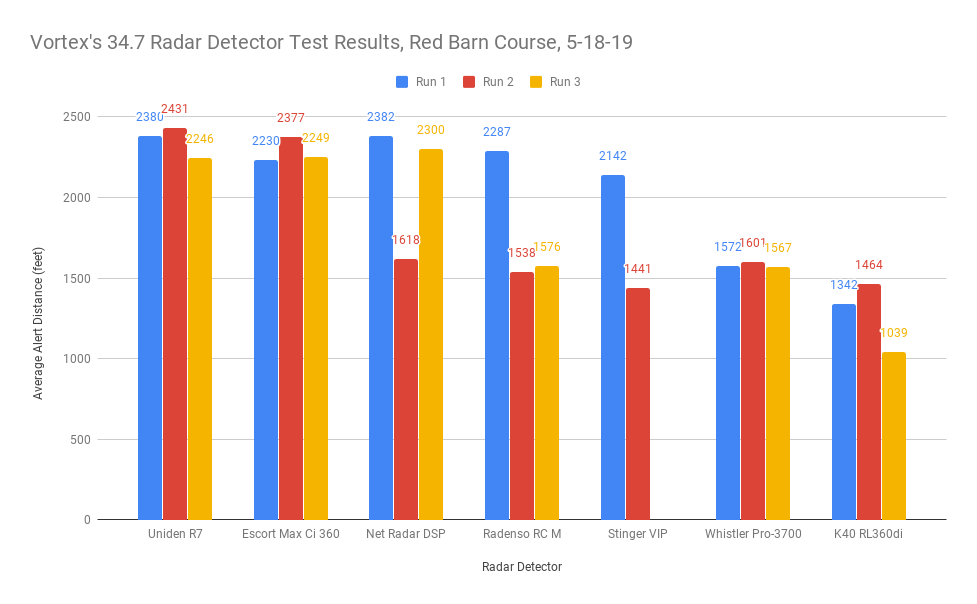
The R7 and Max Ci 360 did the best, both able to give long range detections each and every time. The Net Radar DSP was just behind, going 2 for 3. The RC M and Stinger got long range detections once and a mid-range detections otherwise. (I miscounted and forgot to run the Stinger a third time, but you can still see it hanging right up there with the top tier detectors where it belongs.)
Moving on to the lower tier detectors, the Whistler gave mid-range detections every time. Surprisingly, K40’s top of the line radar detector lagged behind the $350 Whistler. (Note, the Pro-3700 is a remote version of the older CR93, not the newer and more sensitive CR97.) Now I wasn’t expecting the K40 to beat its true competition from the upper tier, but that’s still a pretty bad showing by the K40.
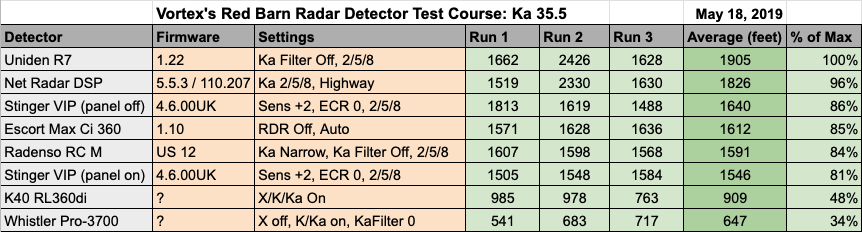
35.5 Test Results
Next up, let’s switch to 35.5. Traditionally 35.5 is pretty difficult to detect so I was curious to see if we’d see a pretty clear difference between the higher end and lower end radar detectors.

First up, let’s take a look at the raw data.
and here’s the chart to make things easier to visualize.
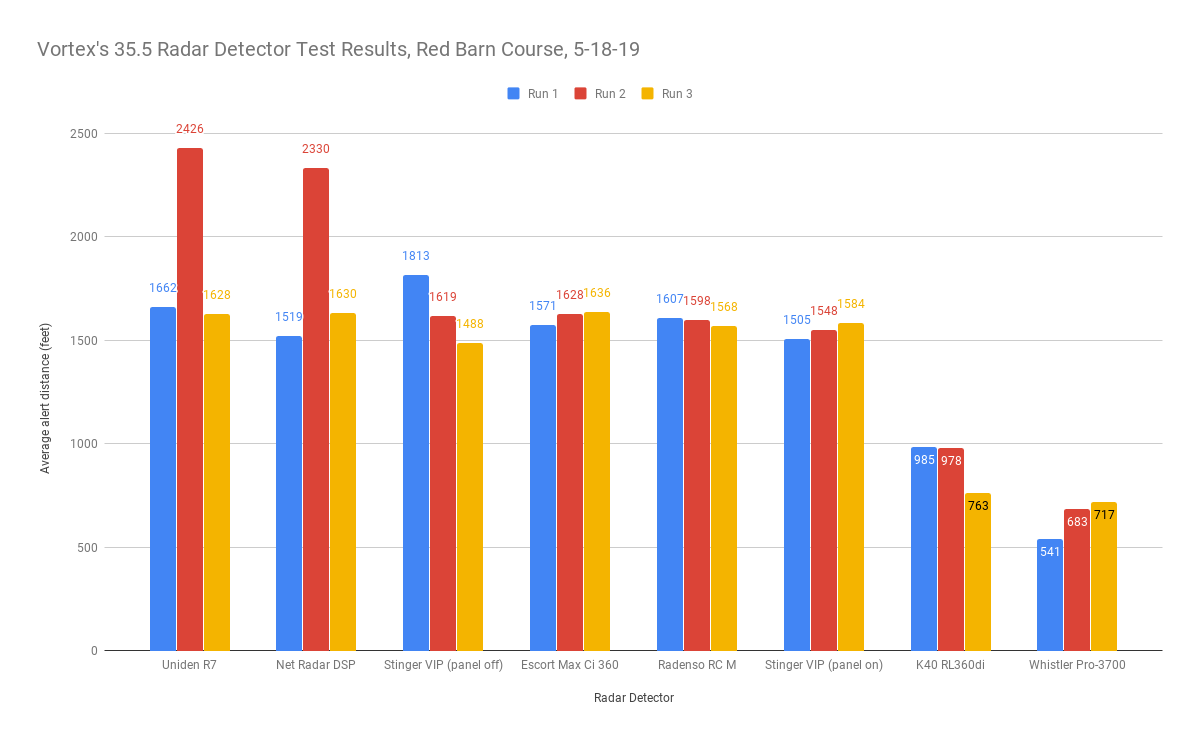
Most of the upper tier detectors alerted all around the same 1500-1600 foot range. The R7 and NR DSP both managed one long range detection just after the red barn. All of the top tier detectors offered plenty of advanced warning to slow down and avoid a ticket.
The K40 and Whistler, however, lagged behind the rest. Fortunately for K40’s sake, this time it managed to edge out the Whistler which only alerted a few sec before the kill zone.
35.5 was the last radar frequency we were planning to run so I did three runs with the Stinger with the removable foglight panel removed and three more with the panel covering it. Just like last time, there wasn’t much of a difference with the panel on or off. I did see slightly more run-to-run variation with the panel off than on and the overall average did drop slightly with the panel on, but it’s all within the bounds of normal variances.
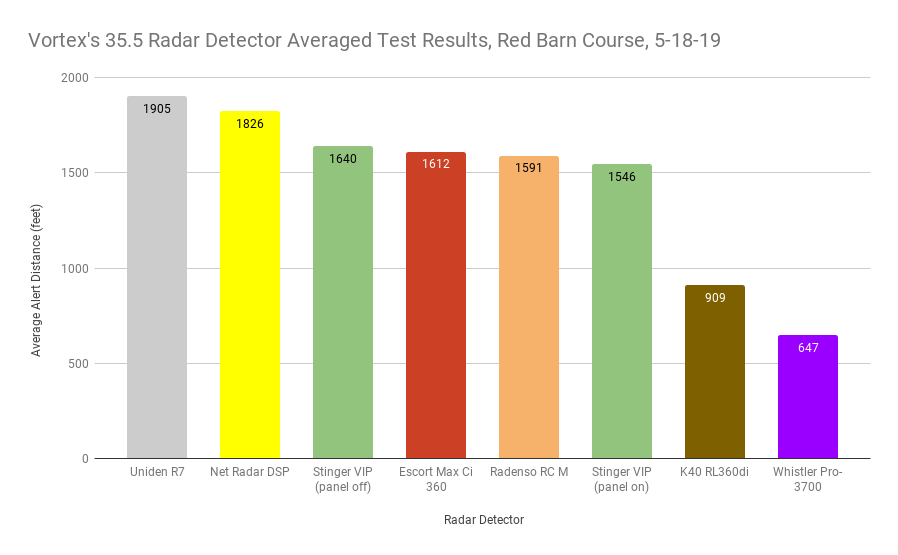
Either way, what we’re seeing here is that the top tier detectors from Uniden, Net Radar, Stinger, Escort, and Radenso all sit head and shoulders above the detectors from K40 and Whistler.
K Band Test Results
Finally, let’s take a look at K band. I wasn’t expecting to have time for K band, but I brought the antenna for the Genesis II just in case. It’s quicker to test remotes than windshield mounts since there’s no detectors to mount and unmount, plus 33.8 getting abruptly ended gave us some extra time at the end of the day to test K band.

Now K band is a tough one to test. There’s SOOO many different combinations of filtering settings to choose from that it’s hard to create a level playing field for the detectors. It’s for this reason that I’d like to spend a full day sometime on just K band testing with lots of different detectors and settings.
For this weekend’s test, I wanted to try the detectors in the filtering settings I normally run day-to-day as well as with some filters disabled (which means lots of false alerts) to get better performance.
First up, let’s look at the results.
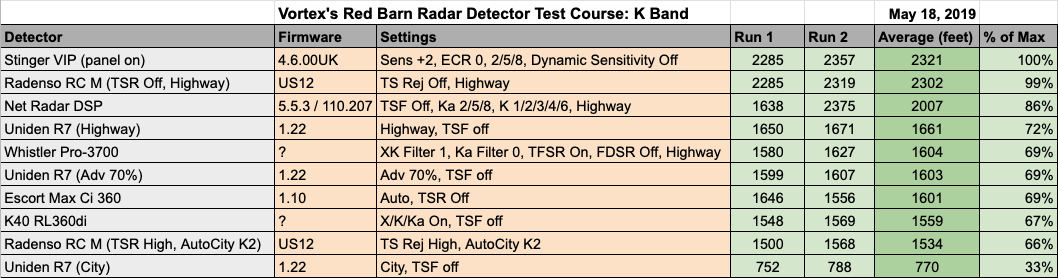
Here’s the chart of the detector’s test runs:
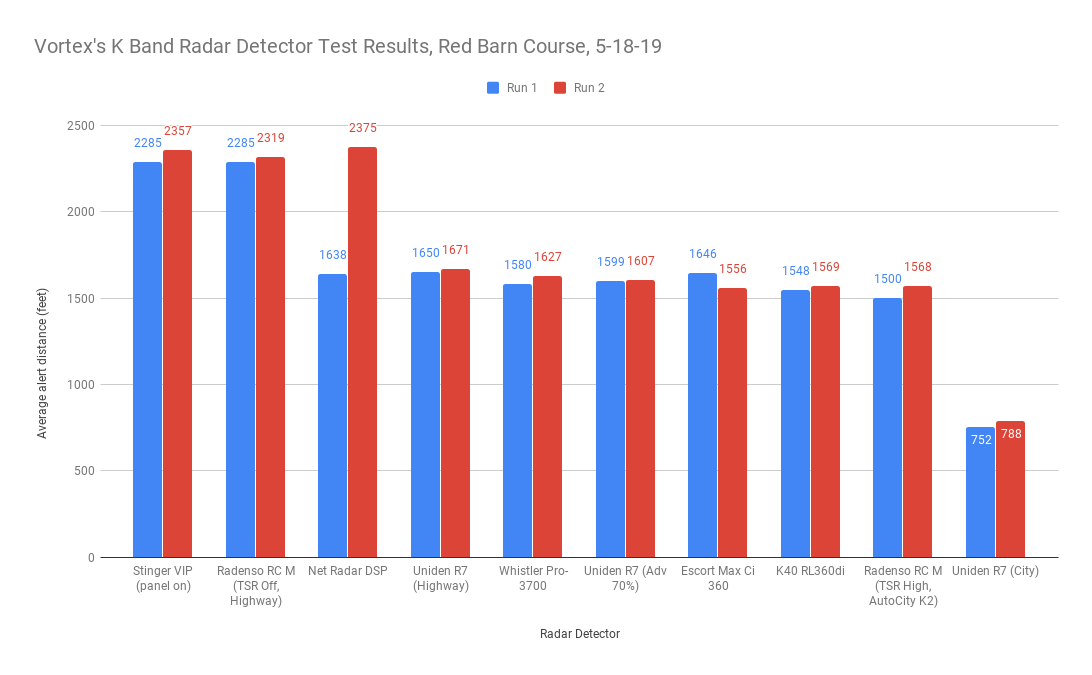
Most detectors gave very similar runs for both passes. The NR DSP managed one long range detection and one mid-range detection. As you can see looking over these results, things are clearly terrain limited here which makes it harder to see the exact differences in sensitivity between detectors. There are three distinct zones where the signal would suddenly get stronger and thus different detectors would start alerting.
Let’s take a look at the averaged results to simplify things a bit.
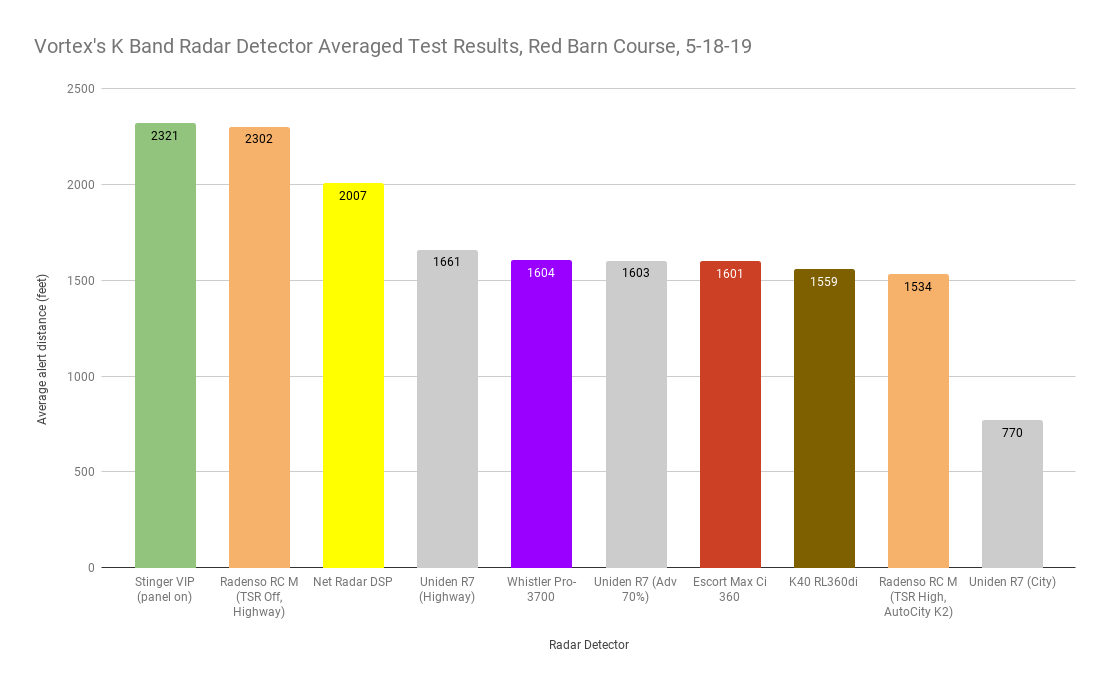
The top performer was the Stinger. This was especially impressive given that I had put the plastic foglight panel back on during 35.5 testing. Now Stinger had released firmware 4.6.00UK the morning of the test and so I updated literally while driving to the test course. Stinger’s filtering options are pretty complex and hard to understand, plus with the latest firmware there’s now new filtering options and they renamed some of the settings. That, combined with the changes they make between firmware versions anyways meant that I wasn’t really sure about the optimal settings for the Stinger. I set it to fairly sensitive options and it shows. That said, during testing I picked up a Honda/Acura BSM false from hundreds of feet away so in reality you’d want to run more aggressive filtering options.
The Radenso did excellent as well when run in Highway mode with TS Rej off. The recommended / default settings with TS Rej High (to get Honda/Acura filtering) and Auto City with a slight reduction in K band sensitivity below highway speeds does reduce range slightly, as expected.
The NR DSP did pretty well too. It’s based on the same platform as the R3, so no surprise there. Plus they recently introduced K band segmentation which allows you to disable Honda/Acura BSM falses between 24.195 – 24.205.
Most all of the detectors alerted right around the same location, thanks to the layout of the terrain. The only exception is the Uniden R7 when run in City mode which drops sensitivity down to ~10% so that makes sense.
So most all did pretty well on K band in this particular situation. Nevertheless, things vary across the board as you can see.
Radar Detector Testing Conclusions
So looking at this test, there’s several key takeaways.
First off, all the top tier radar detectors consistently perform well, even in (and especially in) more challenging situations. When it comes to range, I think people would be happy with most any of them. Personally I find the biggest differences between them to be not so much range, but rather features, BSM filtering, and price. Now that I’m finished with this testing, I’d like to do an updated comparison soon of the best custom installed radar detectors where I’ll go into this in more detail.

For example, the Escort Max Ci 360 is a well-rounded and refined detector. The Radenso RC M has better BSM filtering and MultaRadar support. The Net Radar DSP is a great affordable pick if you’re running an ALP for laser and you’re okay with some of its interface limitations. The Stinger VIP is still honestly hard to recommend right now.
When it comes strictly to range though, they are all top notch detectors.
The K40 RL360di and Whistler Pro-3700, on the other hand, these two consistently wound up at the bottom of the pack. They could do alright in easier situations, but they really started to struggle when things got more challenging. The only managed to match the other detectors once the terrain limited how far away the other detectors could alert. To be honest though, this doesn’t surprise me.
You see, several years ago I did another test on this same course featuring the windshield mount K40 RLS2 (same platform and performance as the RL360di) and the Whistler CR85 (same platform and performance as the Pro-3700) and the results were pretty much the same: In easy situations they could hang with some of the mid-tier detectors while in more difficult situations, they were trading shots with a cheapy Cobra.
In terms of interface, I like that the K40 doesn’t have a dedicated display if you want a stealthier install, only two LED’s for front and rear and a single controller, but if you’re not looking for a high end radar detector, you’re probably better off saving your money and getting the Whistler instead.
That said, I personally would feel significantly more confident running a higher end detector in the first place since they offer much more protection (which is why I run them) and so if you’re looking for a custom installed radar detector, I would recommend you take a look at the latest offerings from Escort, Radenso, and Net Radar.
Read about all my top picks for Best Radar Detector.
| This website contains affiliate links and I sometimes make commissions on purchases. All opinions are my own. I don’t do paid or sponsored reviews. Click here to read my affiliate disclosure. |


12 comments
Skip to comment form
IMHO you should randomize the test order of each detector. Test them all once in that random order, that is run 1. Next perform run 2 in another random order then finally run 3 in another random order. Randomization is so each detector has the same probability of being effected by the what you don’t know. For example, what if there is another signal source that wanders in to your testing area. It could effect the results of tests for a short time. Using this method you can test for these time based effects by comparing means of run 1,2 and 3.
Author
We actually did that to some extent. We start by doing one run with each detector at first to see if we start seeing differences in separation between detectors. I mentioned that with the 33.8 testing and it’s why I stopped and changed things. So one run with each detector and then later two more.
“The only exception is the Uniden R7 when run in City mode which drops sensitivity down to ~10% so that makes sense.”
Assuming City mode on the R7 is the same as the R1/R3 (-15dB), you’d expect ~18% of the range in Highway: https://www.rdforum.org/index.php?threads/66080/
Relative sensitivity is actually only around 3%!
Author
haha yeah you keep hearing a bunch of numbers thrown around that it starts to get confusing. I think ultimately the exact numerical amount isn’t really that important. The idea is simply that it cuts sensitivity and thus range dramatically.
Great test. Would love to see a test of the new Stinger HD+ antenna with the latest firmware after you’ve had some time to better understand the settings.
Author
Yeah I’m not sure how easy it would be to swap out my HD antenna for the HD+, but we’ll see about that next year. 🙂
Good question. I’m pretty sure the connections are the same for whatever that’s worth. I bet they would send you a set for free too since you seem to be the only source of real unbiased testing. Anyway, hope you keep it on the list. Thanks for the response! (Next year?! Are you taking Paternity leave? Hope you do buddy..all the best!)
between the Radenso and the Net Radar, which did you feel was best in performance overall (range, and filtering false alerts) for city and highway?
Author
IMHO the biggest difference is in the interface, not so much range and filtering. The RC M was better in filtering, but the recently released ARF in the NR DSP has changed things and we’re all still getting a sense of how much it has changed things. I really don’t like relying on the phone for lockouts with the NR DSP and with some of the interface limitations with the NR DSP, I’d recommend the RC M almost every time. I talk about this a bit more towards the bottom of the article here: https://www.vortexradar.com/best-radar-detectors/
So 360 vs R7? The R7 isn’t a remote mount. What’s your conclusion? Any laser add-on recommendation?
Looking to install radenso in my 2019 Mustang and was wondering which was better with the alp,two regular heads and TX or 3 regular heads for laser.
Author
In general 2 regular + 1 Tx is the way to go. This thread should be helpful.